![[UNSW]](/~cs3231/images/unsw_0.png)
GDB and OS/161
This page contains a short tutorial on using GDB with OS/161.Setting up GDB
Every time you start GDB you will need to tell it the location of your source and how to communicate with system 161. This can become tedious, so we create a shortcut.
Add the following (adjusted for your setup, of course) into your root directory, usually ~/cs3231/root in a file called .gdbinit.
define lab2 target remote unix:.sockets/gdb dir ~/cs3231/lab5/kern/compile/LAB2 set print array on set print pretty on b panic
Whenever you start GDB in this directory, you can type lab2 and the above commands will be run. Note that we also set a breakpoint at the panic function --- whenever the kernel panics the debugger will be entered. The two "set print" line will make your GDB output a little bit easier to read.
An example problem
Consider the following simple implementation of a communication channel where the sender never blocks and the receiver specifies the ID of the thread it wants to receive messages from. (This is sometimes called a closed receive.) Note that this is quite different from the communication channel to be implemented in assignment 1.
/* an extremely simple channel which can queue only one message */
struct simple_channel {
const char *payload; /* a string passed by reference */
};
/* send a message on a channel without blocking */
void
simple_channel_send(struct simple_channel *handle,
const char *payload)
{
int spl;
/* assume for this example that we have exclusive access to the channel */
handle->payload = payload;
spl = splhigh();
/* wake up anyone who is expecting a message from me */
thread_wakeup(curthread);
splx(spl);
}
/* receive a message from the the thread specified by "from" */
const char *
simple_channel_receive_from(struct thread *from,
struct simple_channel *handle)
{
int spl;
spl = splhigh();
thread_sleep(from); /* wait for "from" to send me a message */
splx(spl);
return handle->payload;
}
For the sake of example, we have also limited each channel to only one message at a time, and have neglected to protect the channel from access by multiple senders.
Setting up the Lab
In order to set up the sample code download the tar ball into ~/cs3231/ and untar by
%tar -xvzf lab5.tar.gzThis will create a directory call lab5 with a copy of OS161. The file
kern/lab2/simple_sync.c contains the simple channel
implementation. Have a look!
Follow the same instructions as asst0 to configure and compile the
kernel.
- You first have to configure your source tree.
% cd ~/cs3231/lab5 % ./configure
- Now you must configure the kernel itself.
% cd ~/cs3231/lab5/kern/conf % ./config LAB2
- The next task is to build the kernel.
% cd ../compile/LAB2 % make depend % make
Note: this will overwrite your ~cs3231/root/ so when you return to doing your normal assignments be sure to repeat the following steps
- Now install the kernel
% make install
- In addition to the kernel, you have to build the user-level
utilities.
% cd ~/cs3231/src % make
Running your Kernel
Now let's test our simple channel implementation with a couple of test
threads which send and receive one message to each other. These are called
simple_thread_A and simple_thread_A in
simple_sync.c.
- Change to the root directory of your OS.
% cd ~/cs3231/root
- Now run system/161 (the machine simulator) on your kernel.
% sys161 kernel
-
At the prompt type
ssfor the simple sync test.
$ sys161 kernel ss sys161: System/161 release 1.1, compiled Feb 24 2003 21:57:51 OS/161 base system version 1.08 Copyright (c) 2000, 2001, 2002, 2003 President and Fellows of Harvard College. All rights reserved. Put-your-group-name-here's system version 0 (LAB2 #11) Cpu is MIPS r2000/r3000 1876k physical memory available Device probe... lamebus0 (system main bus) emu0 at lamebus0 ltrace0 at lamebus0 ltimer0 at lamebus0 hardclock on ltimer0 (100 hz) beep0 at ltimer0 rtclock0 at ltimer0 lrandom0 at lamebus0 random0 at lrandom0 lser0 at lamebus0 con0 at lser0 pseudorand0 (virtual) OS/161 kernel: ss simple sync program started thread A started thread B hello I'm thread A hello I'm thread B
You can see that simple sync test hasn't terminated. What is the problem? Without a debugger, it can be difficult to know.
Exploring OS161 internals with GDB
Now let us explore OS161's internal structure using GDB. First we need to
break out of OS161 and into the debugger. You can do this by pressing
Ctl + g while OS161 is running. This will look like
this.
$ sys161 kernel ss sys161: System/161 release 1.1, compiled Feb 24 2003 21:57:51 OS/161 base system version 1.08 Copyright (c) 2000, 2001, 2002, 2003 President and Fellows of Harvard College. All rights reserved. . . . OS/161 kernel: ss simple sync program started thread A started thread B hello I'm thread A hello I'm thread B (press ctl + g here) sys161: Waiting for debugger connection...
Now we hook GDB up to os161,in another terminal, we change directory to the root directory and run GDB. We run the lab2 command to setup GDB.
~/cs3231/root$ cs161-gdb kernel GNU gdb 4.18 Copyright 1998 Free Software Foundation, Inc. GDB is free software, covered by the GNU General Public License, and you are welcome to change it and/or distribute copies of it under certain conditions. Type "show copying" to see the conditions. There is absolutely no warranty for GDB. Type "show warranty" for details. This GDB was configured as "--host=i686-pc-linux-gnu --target=mips-elf"... (gdb) lab2 cpu_idle () at ../../arch/mips/mips/spl.c:155 155 interrupts_onoff(); Breakpoint 1 at 0x800111f4: file ../../lib/kprintf.c, line 94. (gdb)
Let's see which thread is currently running. This can be
checked by looking at the global variable in the kernel called
curthread.
(gdb) p curthread $1 = (struct thread *) 0x0
This shows that there is currently no thread running. Let's have a look what the OS is doing by running it for a few more steps.
(gdb) next
93 while (q_empty(runqueue)) {
(gdb) next
94 cpu_idle();
(gdb) next
93 while (q_empty(runqueue)) {
Which indicates that the runqueue is empty and there is no thread to schedule.
Next, let's have a look at the number of threads that currently exist the system and what state they're in.
(gdb) p numthreads
$2 = 3
(gdb) p *zombies
$3 = {
num = 0,
max = 6,
v = 0x8002dd80
}
(gdb) p *sleepers
$4 = {
num = 3,
max = 6,
v = 0x8002dda0
}
We can now conclude that there's currently 3 threads, that none of them is a zombie and they are all sleeping for one reason or another.
Next lets have a look at the threads that are asleep.
(gdb) p *((struct thread **) (sleepers->v))[0]
$5 = {
t_pcb = {
pcb_switchstack = 2147659208,
pcb_kstack = 2147659776,
pcb_ininterrupt = 0,
pcb_badfaultfunc = 0,
pcb_copyjmp = {0 <repeats 11 times>}
},
t_name = 0x8002bfc0 "<boot/menu>",
t_sleepaddr = 0x8002bd00,
t_stack = 0x0,
t_vmspace = 0x0,
t_cwd = 0x8002df40
}
(gdb) p *((struct thread **) (sleepers->v))[1]
$6 = {
t_pcb = {
pcb_switchstack = 2147683844,
pcb_kstack = 2147684352,
pcb_ininterrupt = 0,
pcb_badfaultfunc = 0,
pcb_copyjmp = {0 <repeats 11 times>}
},
t_name = 0x8002bce0 "thread A",
t_sleepaddr = 0x8002ce00,
t_stack = 0x80030000 "®\021Ú3",
t_vmspace = 0x0,
t_cwd = 0x8002df40
}
(gdb) p *((struct thread **) (sleepers->v))[2]
$7 = {
t_pcb = {
pcb_switchstack = 2147687900,
pcb_kstack = 2147688448,
pcb_ininterrupt = 0,
pcb_badfaultfunc = 0,
pcb_copyjmp = {0 <repeats 11 times>}
},
t_name = 0x8002bcc0 "thread B",
t_sleepaddr = 0x8002ce80,
t_stack = 0x80031000 "®\021Ú3",
t_vmspace = 0x0,
t_cwd = 0x8002df40
}
(gdb)
The interesting field in the thread control block is the t_name
and the t_sleepaddr. The t_name is the name of the
thread, which makes identifying the threads very easy. The thread with the
name "<boot/menu>" is the thread that runs the menu and then
the initial test command. In the case of this lab, it is block on a semaphore
called "Finished" in cmd_simple_sync() which is in
kern/lab2/simple_sync.c. We can confirm this by printing out the
t_sleepaddr in the TCB.
(gdb) p *((struct semaphore *) ((*((struct thread **) (sleepers->v))[0])->t_sleepaddr))
$8 = {
name = 0x8002bcf0 "Finished",
count = 0
}
Now lets take a look at what our threads are blocked on.
If we take a look at the code in kern/lab2/simple_sync.c,
We can see that on simple_channel_send() the thread
calls thread_sleep()on the sender in order to wait for
the sender to prepare the message and wake the receiver up when the
message is ready. As the address of the sender is given as a sleeping
address we can see what thread the sleeping threads are waiting on.
(gdb) p *((struct thread *) (*((struct thread **) (sleepers->v))[1])->t_sleepaddr)
$9 = {
t_pcb = {
pcb_switchstack = 2147687900,
pcb_kstack = 2147688448,
pcb_ininterrupt = 0,
pcb_badfaultfunc = 0,
pcb_copyjmp = {0 }
},
t_name = 0x8002bcc0 "thread B",
t_sleepaddr = 0x8002ce80,
t_stack = 0x80031000 "®\021Ú3",
t_vmspace = 0x0,
t_cwd = 0x8002df40
}
(gdb) p *((struct thread *) (*((struct thread **) (sleepers->v))[2])->t_sleepaddr)
$10 = {
t_pcb = {
pcb_switchstack = 2147683844,
pcb_kstack = 2147684352,
pcb_ininterrupt = 0,
pcb_badfaultfunc = 0,
pcb_copyjmp = {0 }
},
t_name = 0x8002bce0 "thread A",
t_sleepaddr = 0x8002ce00,
t_stack = 0x80030000 "®\021Ú3",
t_vmspace = 0x0,
t_cwd = 0x8002df40
}
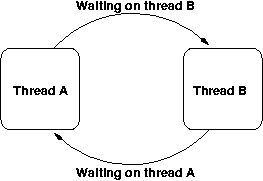
Aha! The two threads are deadlocked. Thread A is waiting for thread B to send, while thread B is waiting for thread A to send. The following picture illustrates the situation.
Fixing the problem
Now the fun part, using what you have just seen figure out how to solve the deadlock. When your done it should come out like the following.
$ sys161 kernel ss
sys161: System/161 release 1.1, compiled Feb 24 2003 21:57:51
OS/161 base system version 1.08
Copyright (c) 2000, 2001, 2002, 2003
President and Fellows of Harvard College. All rights reserved.
Put-your-group-name-here's system version 0 (LAB2 #12)
Cpu is MIPS r2000/r3000
1876k physical memory available
Device probe...
lamebus0 (system main bus)
emu0 at lamebus0
ltrace0 at lamebus0
ltimer0 at lamebus0
hardclock on ltimer0 (100 hz)
beep0 at ltimer0
rtclock0 at ltimer0
lrandom0 at lamebus0
random0 at lrandom0
lser0 at lamebus0
con0 at lser0
pseudorand0 (virtual)
OS/161 kernel: ss
simple sync program
started thread A
started thread B
hello I'm thread A
hello I'm thread B
thread B:I'm sending to thread A
thread A:I got sent ('Hello A, this is B!')
thread A:I'm sending to thread B
thread B:I got sent ('Hello B, this is A!')
Operation took 0.934908680 seconds
OS/161 kernel [? for menu]:
Things to be careful about
There are a few things to keep in mind...
- Not every "hang" is a deadlock.
It could be an infinite loop, it could be just sleeping, or it could be waiting for some input. - Not all deadlocks are as easy to detect as this one was.
- Threads can sleep on anything, not just semaphores or other threads.
Happy hacking!